- イヌが「フセ」の姿勢になるように誘導する
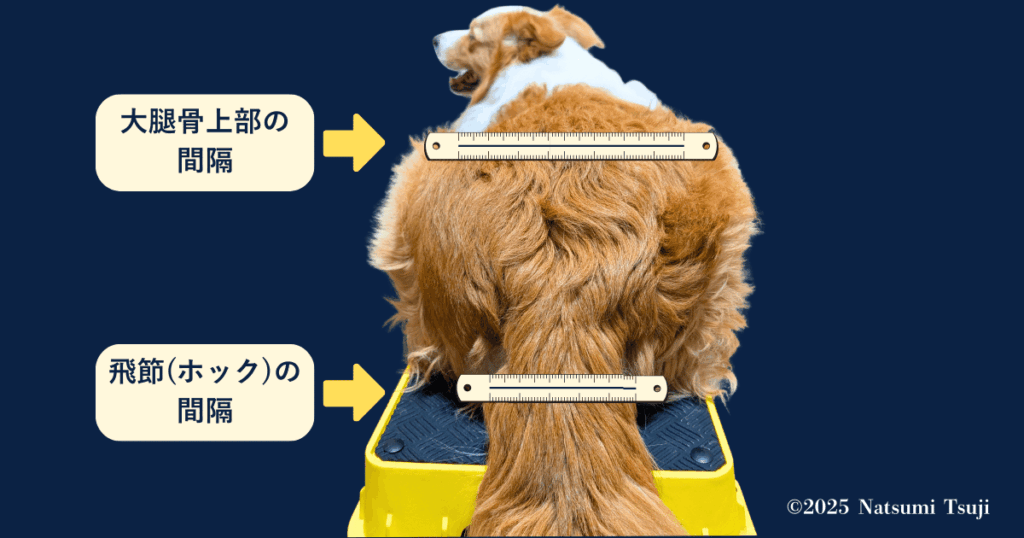
- 左右の飛節(ホック)間の距離を計測する(測定値Ⓐ)
- 左右の大腿骨上部の間の距離を計測する(測定値Ⓑ)
イヌによっては、筋肉量・骨格構造などの要因によって、「Ⓐ飛節」と「Ⓑ大腿骨上部」の長さが異なる場合があります。
その場合は、以下の計算式を使用して適切な幅を算出してください。
(測定値Ⓐ+測定値Ⓑ) ÷ 2 =平均値
- 幅が広すぎる:
後肢が外旋もしくは外転傾向のある個体のアライメント(姿勢)の修正が難しくなる。 - 幅が狭すぎる:
内転筋の負荷が強くなり、膝関節などへ負担がかかる。また、プラットフォームの上に立つのが難しくなり、学習のエラーが起きやすい。
- イヌが「フセ」の姿勢になるように誘導する
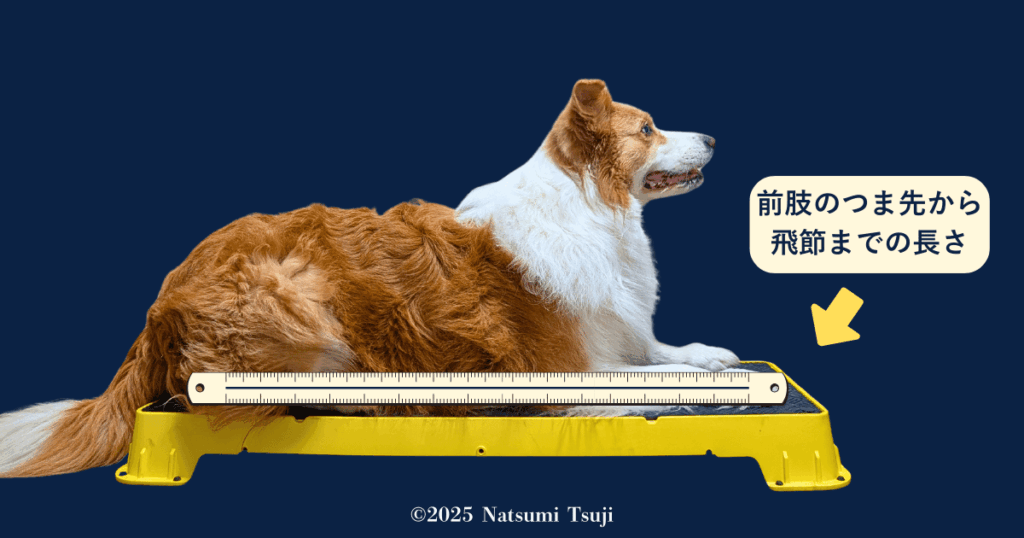
- 前足の指先 → 飛節(ホック) までを計測する(測定値©)
※オスワリをした場合の「前足の指先→飛節」までの計測(測定値Ⓓ) - イヌの体格に応じて「前後の余白」を追加する
プラットフォームの長さも幅と同様に、重要なポイントになります。
余白の長さは、合計5~10㎝ほどが推奨されますが、それよりも長い分に関しては問題ありません。
※長すぎると持ち運びが大変になります。

イヌのコンディショニング・エクササイズを行う上で、最も基本的なプラットフォームです。
- 幅 :測定値Ⓐと測定値Ⓑの平均値
- 長さ:測定値©+余白(※5~10㎝以上)
オスワリ(座位)における後肢・骨盤のアライメントを安定させるためのプラットフォームです。
※スタンドプラットフォームと兼用することもできます。
- 幅 :測定値Ⓐと測定値Ⓑの平均値
- 長さ:測定値Ⓓ+余白(※5~10㎝以上)
特定の肢(前肢または後肢)を「正確な位置に置く」ことを学習させるためのプラットフォームです。
大きなサイズのプラットフォームよりも、プロプリオセプション(固有受容覚)を向上させることができます。
※プロプリオセプション(固有受容覚):
視覚を使わずに自身の身体が空間のどこにあり、どのように動いているかを認識する能力のこと。
- 幅/長さ:イヌの肉球のサイズに応じる
※細長い長方形・円形など場面に応じて使い分けることができます。